|
|
ResearchMy research focuses on reinforcement learning, multi-agent systems, and robotic manipulation. I am particularly interested in developing robust learning algorithms that enable robots to adapt and collaborate in dynamic environments. Currently, I am exploring tactile-based reinforcement learning for surface reconstruction and manipulation, as well as skill-based communication in multi-agent systems. |
|
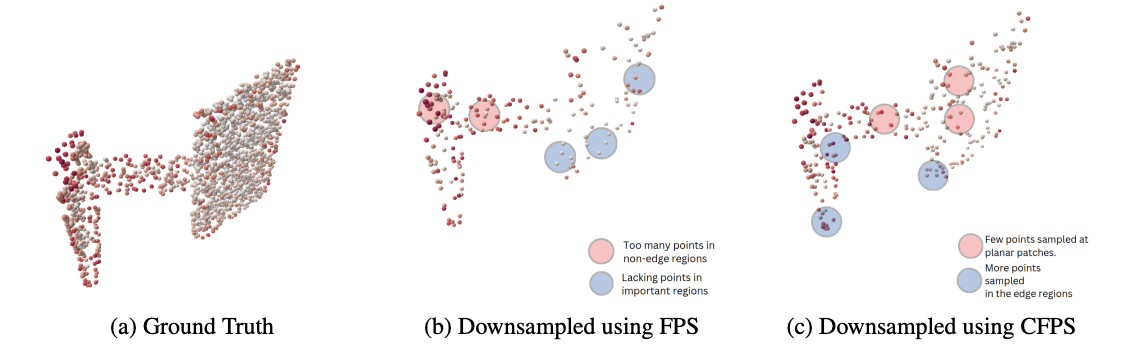
Curvature Informed Furthest Point SamplingShubham Bhardwaj, Soumojit Bhattacharya*, Ashwin Vinod*, Aryan Koganti, Aditya Sai Ellendula, Balakrishna Reddy arXiv 2024, 2024 arxiv / Proposed CFPS, a curvature-informed point cloud sampling method using reinforcement learning to optimize point selection. Paper under review arXiv |

|
Blind Tactile Exploration for Surface ReconstructionYashaswi Sinha*, Soumojit Bhattacharya*, Yash Kumar Sahu and Pradipta Biswas ICRA 2025(accepted), 2024 Developed a tactile exploration algorithm for reconstructing fine surface details of objects using a sequential controller-based approach. ICRA 2025 |

|
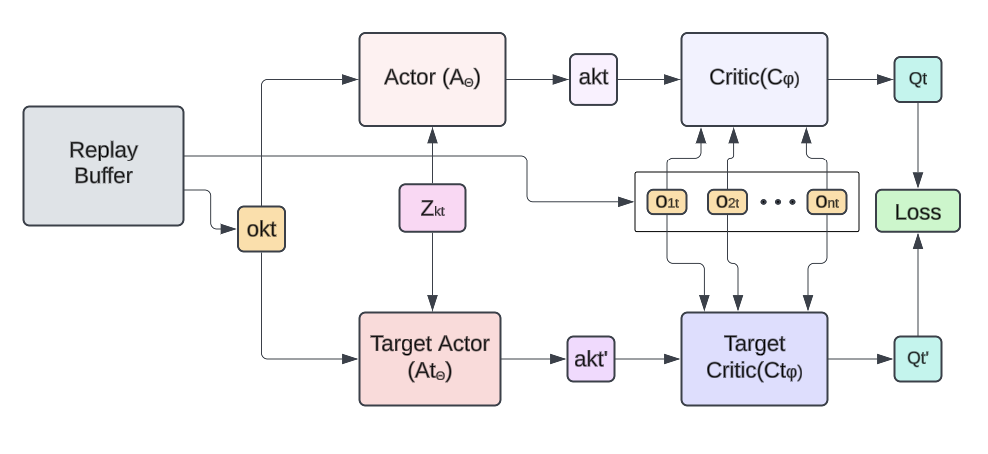
DiffClone: Enhanced Behaviour Cloning in Robotics with Diffusion-Driven Policy LearningSabariswaran Mani, Sreyas Venkataraman*, Abhranil Chandra*, Adyan Rizvi*, Yash Sirvi*, Soumojit Bhattacharya*, Aritra Hazra TOTO Benchmark|Neurips 2023, 2010 arxiv / Developed DiffClone for offline RL tasks involving pouring and scooping with sparse rewards. arXiv |
Other ProjectsThese include coursework, side projects, and unpublished research work. |

|
Scalable Multi-Agent Robot Swarm NavigationDeveloped an end-to-end pipeline for multi-agent pathfinding in dynamic environments using reinforcement learning techniques. |
|
Skill-Based Communication for Multi-Agent Reinforcement LearningDeveloped a skill-based communication framework for MARL to enhance coordination and scalability in partially observable environments. |
|
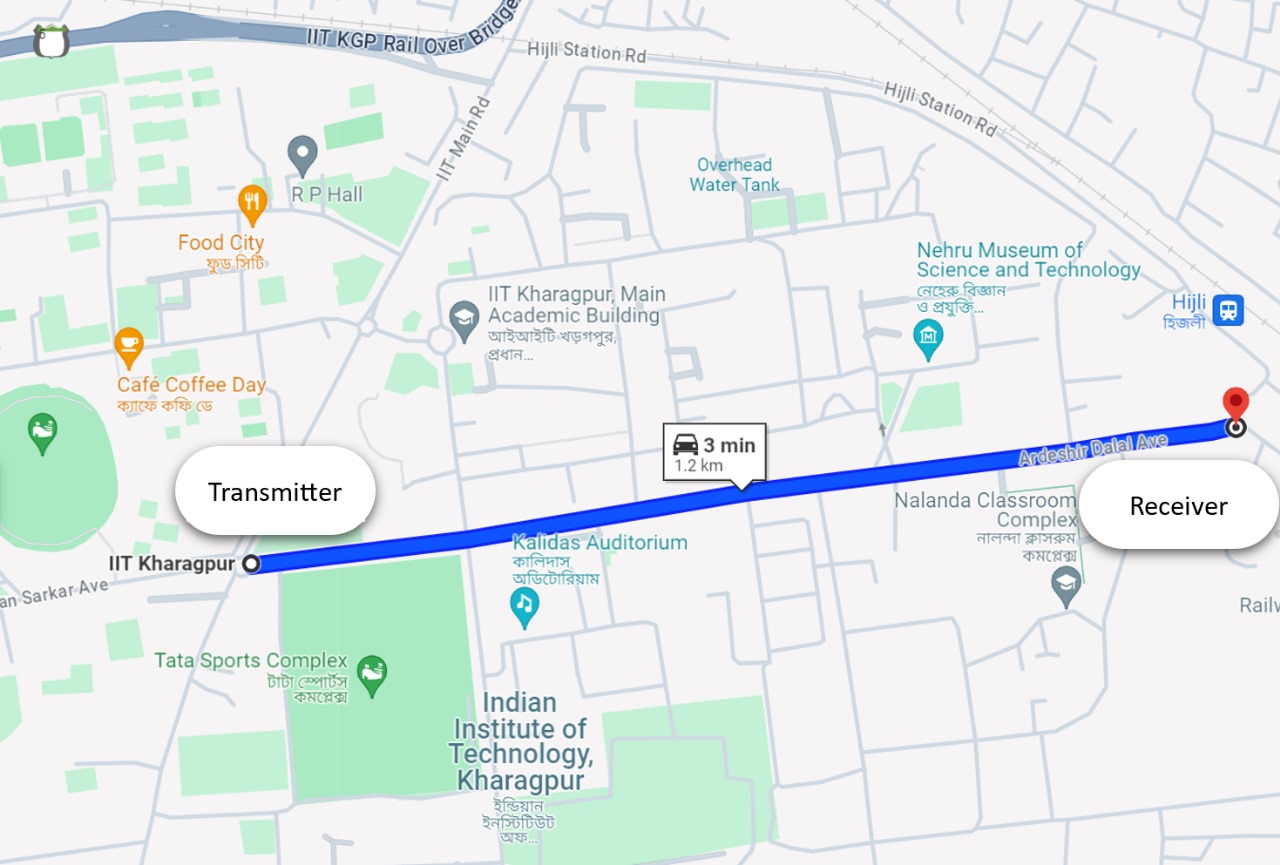
Student Satellite Program - Communication System DesignDesigned and tested CubeSat communication systems, overcoming obstacles such as trees and buildings to establish successful ground-based transmission. |
|
Design and source code from Jon Barron's website |
